Measurement of "G".
Determination of Newtons constant of
Gravitation.
Contact C. C.
Speake
Research at the
International Bureau of Weights and Measures in France (BIPM)
into the fundamental limitations to the resolution of force
measurements due to anelasticity led to the development of a
torsion-strip balance (see Meas Sci Technol 10 430-234 1999
for a review). We rediscovered that the restoring torque of a
strip, whose thickness is much less than its width, is
essentially determined by the weight of the suspended torsion
bob rather than the elastic properties of the material from
which the strip is made. This observation allowed us to design a
determination of Newtons constant of gravitation with the
following features:
·
A four test mass configuration, rather than the usual
2-mass dumbell, to give much reduced sensitivity to external
gravitational perturbations. The torque due to a point source
mass falls off as the inverse fifth power of distance rather
than the 3rd power for the 2-mass case.
·
The torsion strip has a restoring torque that is 96%
gravitational. This gives the balance a quality factor of 3x105.
The ringdown time is about 5 months.
·
The test masses weigh approximately 1.2 kg. Four source
masses of approximately 12kg are mounted on a carousel and
generate a gravitational signal torque of approximately 3x10-5
Nm. This torque is some 4 orders
of magnitude larger than employed by other G determinations that
use classical torsion fibres.
·
We can use the torsion-strip balance in 3 modes. The
first method is that first implemented by Henry Cavendish in
1798, where the deflection of the balance is readout using an
autocollimator. Accurate timing of the period of oscillation
together with a calculation of the moment of inertia of the bob
are used to determine G. The torsion strip design effectively
eliminates the effects of anelasticity on this measurement. In
the second method the force of gravity is measured (servoed)
against the torque due to electrostatic actuators. The actuators
have a novel geometry such that their capacitance varies
linearly with the angular displacement. This slope is determined
using a three terminal technique and an accurate
Andeen-Hagerling capacitance bridge together with accurate
measurement of angular motion using an Elcomat autocollimator.
The third method uses the change in the oscillation period of
the torsion balance as the source masses add or subtract from
the restoring torque of the torsion strip.
·
The complete apparatus is mounted on a Coordinate
Measuring Machine that enables the relative positions of the
masses to be determined with sub-micrometer accuracy.
We published
results from the Cavendish and the Servo methods in 2001 (Phys
Rev Letts 87 111101-1 September 2001). The combined result for
Newtons constant for the 2 methods was 6.667559(67)x10-11
m3kg-1s-2 (a relative accuracy
of 41ppm). This number differed by 200ppm from the result of
Gundlach and Merkowitz. We have rebuilt the apparatus and we are
now performing another determination of G to cast light on the
discrepancy
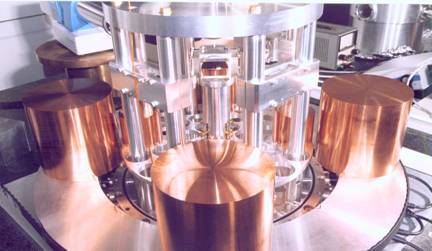
Figure showing the Torsion strip balance at BIPM that was used
for the 2001
determination of G.

